


定位系统在图像处理上的应用
2012/8/29 15:48:14
一、 工作要求:
1、采用视觉系统对图像进行检测。:
1、采用视觉系统对图像进行检测。:
2、检测范围:
X , Y 的有效行程分别为500mm 和 400mm 。在 Y 轴下端装配 视觉像机。
3、 工件形状:
工件为电脑液晶显示器,该显示器有大有小,工作台每次安装10个显示器,以备检测。
4、 定位位精度及分辨率:
定位度为0.01mm
5、控制系统:
系统要求能够对检测数据要进行分析处理。
二、机器人组成:
该机器人由安装架及显示器工作台、机器人定位系统、伺服驱动系统、末端检测设备(相机)、控制系统等组成。
1、机器人定位系统
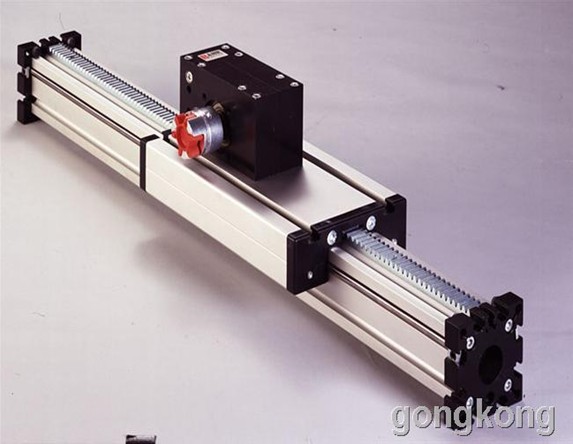
因为该结构要求的定位精度很高,用一般的传动方式,如滚珠丝杠传动,很难实现,我们选者了直线伺服电机定位单元。
X轴选用两根DSM120定位单元。该定位系统的轨道是由两排直线滚珠轨道组成的,轨道并排安装在DS120定位型材的内底面两侧,直线电机的定子安装在DS120定位型材内底面的中部,直线电机的动子安装在DS120的滑块上,滑块与轨道安装在一起,在轨道上运动。两个电机分别由两台伺服驱动来驱动,由同一控制信号控制,保证严格的同步。
Y轴选用一根DSM120定位单元,为便于安装负载,DSM120 滑块安装面与工作台面垂直。负载直接安装在该轴的滑块上。
2、伺服驱动系统
直线伺服电机作为驱动已经与定位单元融为一体,不再需要其他的驱动。
3、视觉系统
该部分由光源、镜头等组成。功能是时时将图像传输给控制中心。
4、控制系统
控制系统由大型PLC、触摸屏组成。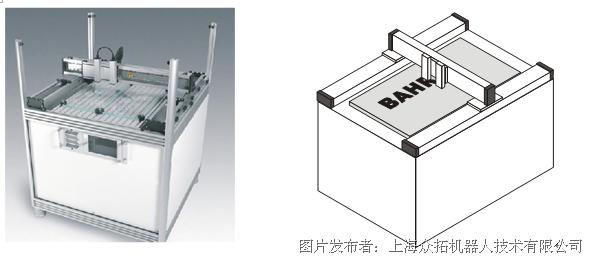




 投诉建议
投诉建议
提交
查看更多评论
其他资讯
德国BAHR 齿轮齿条定位系统

德国BAHR 防爆定位系统

德国BAHR 同步带定位系统

上海众拓 机床上下料机器人
上海众拓 码垛机器人